| |
WRC
|
 |
| |
|
|
 LABORATORY OF APPLIED ACOUSTICS LABORATORY OF APPLIED ACOUSTICS |
|
 |
| |
The laboratory is headed by V. V. Borodin, D.Sc.
Development of computer models of fields of signals and interference
in the ocean and shallow water.
Development of solution methods for underwater observation problems
for underwater and surface detection of targets, their localization and
classification.
Development of effective algorithms for signal processing.
Development of techniques and computer codes for solution of ocean tomography
problems.
Development of methods of joint solution of underwater observation
and ocean tomography problems.
Development and manufacturing of sonar prototypes for shallow water
basins, i.e. lakes, rivers, and beaches.
Development and manufacturing of sonar prototypes for determination
of bottom stratification, i.e. thicknesses of layers and their acoustic
parameters.
Development and manufacturing of prototypes of acoustic cameras and
videosonars for determination of underwater object shape.
The following computer models are designed:
of a direct field in inhomogeneous waveguides, sea noise, echo-signal
field in the case of combined and separate radiation and reception, sea
reverberation of different types (surface, bottom and volume).
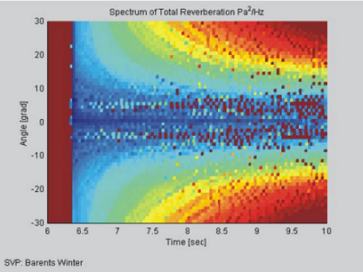 |
Fig.1. Angle-time spectrum of bistatic reverberation
|
Adaptive algorithms of signal processing with high resolution are designed
and studied.
Methods of joint solution of detection, localization and classification
problems for underwater and surface objects are developed on the basis
of the algorithms matched to the stochastic structure of a sea medium.
Numerical studies of synthesized algorithms are carried out.
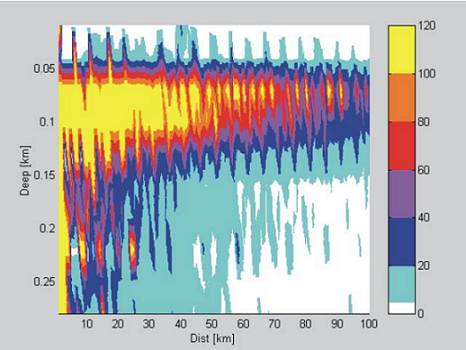 |
Fig. 2. Detection zones for an algorithm matched to a medium
|
A general approach to the solution of the tomography problem and
to estimation of the solution quality is developed.
Sound field parameters carrying information on various inhomogeneities
are determined.
Suboptimal algorithms for the solution of the tomography problem
are synthesized and numerical study of their efficiency is carried out.
Recommendations on the main parameters of tomography systems (optimal
bands, signal envelopes, geometries and mutual location of radiating
and receiving antennas) are presented.
A sonar prototype for the determination of the bottom contour and
for the detection of objects in water, at the bottom and within the
bottom is designed and manufactured.
 |
Fig. 3. General view of sonar |
|
|
